Multi-agency and Real-time Composition: In Equilibrio
Abstract
Live electronics has a history that dates back as early as the 1920s. Electroacoustic instruments, such as the Theremin, the Ondes Martenot, the Trautonium, and even the Hammond organ, date from this decade. John Cage’s use of performative actions on variable speed phonographs in his Imaginary Landscape #1 of 1939 is another early landmark. However, it was the 1970s, and the work of David Behrman, Salvatore Martirano, and Joel Chadabe, that brought forth the possibilities of interactive music, with systems that could participate in the compositional process by making musical decisions. The composer/performer could then react to these decisions, thereby making the entire process interactive.
The evolution of what Chadabe termed “interactive composition” is “realtime composition”: the ability to deliberately compose material in performance (as opposed to improvisation) with the help of software. This has become possible through the use of methods found in artificial intelligence, one of these being multi-agency. Aspects of multi-agents, and their application in musical performance, will be introduced in this presentation, specifically in the context of the author’s own research project, Kinetic Engine.
1. Introduction
For the last twenty-odd years, I have been involved in creating software for real-time performance. However, unlike many of those involved in live electroacoustics, my interests are not as a performer who wishes to expand or extend their instrument, but rather as a composer. This may seem a little odd, since live electronics has, for the most part, been concerned with improvisation.
2. Real-time Composition vs. Improvisation
In a paper published in the Live-electronics — Improvisation — Interactivity issue of eContact!, I outlined what I consider to be the differences between improvisation and what I call real-time composition. The first point that I make is that I consider composition to be the deliberated ordering of events prior to performance, and it is this deliberation that allows for both the horizontal and vertical complexity of Western Art Music. Improvisation, while offering other types of complexities, cannot achieve the same level of horizontal and vertical complexity for long periods of time, simply due to constraints on human memory, and limits on the interaction between players.
Another important point I make is the difference between organized complexity vs. disorganized complexity, using the definition posited by Weaver in his seminal article “Science and Complexity” from 1948. The complexity of a system, whether it is a piece of music or a living organism, is the degree of difficulty in predicting the properties of the system.
Thus, something like John Cage’s aleatoric procedures, or a granular synthesis texture, is extremely complex due to our inability to predict individual events. Weaver considers this to be disorganized complexity, which can be understood (as well as generated) by statistical models.
Organized complexity, on the other hand, achieves its complexity through the interaction of its parts, and has the potential to have emergent properties. Thus, the type of complexity offered by Western Art Music is organized, whereas random methods create disorganized complexity.
The specific type of music that I am interested in, sometimes called interactive computer music, has very often been concerned with improvisational models, and used constrained random procedures to generate its complexity. My goal is to achieve the organized complexity of deliberated composition, but during performance: thus, real-time composition. This may seem impossible, given the definitions I have just cited and the physical and mental limitations of humans. I believe, however, that through the codification of musical knowledge such a system is possible in software.
2.1 Interactive Composing
Joel Chadabe was one of the first composers to purse the notion of live composition through what he considered “interactive composing.” This involved “a mutually influential relationship between performer and instrument,” a process that he has likened to sailing a boat on a stormy lake, reacting to the immediate environmental changes.
An interactive composing system operates as an intelligent instrument-intelligent in the sense that it responds to a performer in a complex, not entirely predictable way, adding information to what a performer specifies and providing cues to the performer for further actions. The performer, in other words, shares control of the music with information that is automatically generated by the computer, and that information contains unpredictable elements to which the performer reacts while performing. The computer responds to the performer and the performer reacts to the computer, and the music takes its form through that mutually influential, interactive relationship. (Chadabe 1984, 23)
Chadabe considers this compositional, rather than improvisational, performance, since he does not have complete control over his instrument. Although he considers his system an instrument, it is unlike any other (non-EA instrument) in that it generates multiple musical gestures.
These gestures cannot be directly controlled, and requires what Chadabe calls “flying by wire,” an analogy to what pilots of airliners are required to accept: unable to control every aspect on their airplanes, they must rely upon their onboard computer to control non-high-level aspects. Like other practitioners of interactive computer music, Chadabe has had to rely upon constrained random procedures to generate the necessary unpredictability. And such procedures generate disorganized complexity.
3. Artificial Musical Intelligence — Kinetic Engine
In order to achieve organized complexity in real-time, we require some sense of musical intelligence. This has been my goal since 2005, when I began development of Kinetic Engine. Kinetic Engine versions 1 to 3 were concerned exclusively with rhythmic organization, specifically rhythmic polyphony. The current version, 4, is concerned with harmonic organization.
An important aspect of all four versions is the reliance upon multi-agents for complexity (and in this case, organized complexity). Intelligent agents are elements of code (programs or patches) that:
- operate without direct user interaction (they are autonomous);
- interact with one another (they are social);
- interact with their environment (they are reactive);
- make decisions as to when they should operate, and what they should do (they are proactive).
In Kinetic Engine, musical knowledge is contained within the agents themselves — for example, how to create rhythmic patterns, how to vary them, and, most importantly, how to interact with other agents. A great deal of effort was applied to the interaction of agents, so as to create a rhythmic polyphony that, though created artificially, could have been created by a human (this being one definition of artificial intelligence).
3.1 The Virtual Percussion Ensemble
The musical model I pursued within v.2 is that of an unspecified number of percussionists entering a room full of percussion instruments. What kind of decisions would be necessary to create interesting music (again, as defined by organized complexity )?
3.2 Agent Roles
When a player picks up an instrument, even if that specific instrument has never been played before, they would most likely be able to make specific judgements about it. For example, small instruments tend to have higher frequencies. Given that information, this should determine how the instrument (and thus the agent) would play. In other words, the agent’s role within the ensemble. For example, bass drums would play less often (have lower densities), and tend to emphasize downbeats, while shakers would play more often, and tend to syncopate more. Therefore, each agent assumes a role within the ensemble, based upon the instrument they have chosen.
3.3 The Conductor Agent
Once each agent has chosen some instruments, how do they start to play? There are methods of agent negotiation that would allow for a mediated time signature and tempo, but I want to maintain some control over the music, so I created a Conductor agent, over whom I have control. Thus, time signature, tempo, and subdivision is set by the Conductor.
Next question — how is the performance to start? Does everybody play all at once, or one at a time? Since the agents are autonomous, they make these decisions; however, they do need a collective goal. Thus, through the Conductor, I provide the first objective: to achieve a cumulative density.
Imagine the conductor with his right hand indicating relative density: low = don’t play very much; high = play lots of notes. For a human, “don’t play very much” has meaning, but computers require something more discrete. For this reason, throughout Kinetic Engine, fuzzy logic is used to approximate human evaluations.
So when the Conductor sends the message to play at a “low” density, each agent interprets this differently, depending upon the role they’ve assumed within the ensemble — low density shaker is very different than low density bass drum.
3.4 Agent Personalities
But before an agent will generate and play any pattern, some determination must be made as to who starts playing first, and how to actually start playing. In the human ensemble, musicians react differently to the changing musical environment depending upon their specific personalities; therefore, each of the agent’s in Kinetic Engine have unique personalities as well. Thus, in this case, an agent’s responsiveness parameter would determine how to react to global changes (such as when to start playing), while confidence determines number of notes with which to enter.
3.5 Pattern generation
Agents generate actual patterns through a combination of musical rules and personality characteristics. For example, the Downbeat parameter determines the propensity to play on the first beat, while Syncopate determines how syncopated the player likes to play. These factors then generate probabilities for a pattern generating algorithm, which is then run through knowledge base that checks the pattern against a series of rules in order to avoid certain patterns and encourage others.
3.6 Overall Density — the initial collective objective
The Conductor “listens” to the resulting combination of player patterns, and compares the number of active notes to the requested Density, makes an evaluation, and messages back to the agents whether the cumulative density: for example, “way too low” or simply “too low.” The agents will, once again, react to this message in different ways, with responsive agents being the first to react. If the rating is “way too low,” non-active agents can begin playing, whereas if the rating is simply “too low,” active agents can add extra notes to their patterns. This negotiation between Conductor and Players continues, until the cumulative density is considered “close enough” by the conductor.
An important point is that this negotiation, and resulting adjustments, is not made in “computer time,” which would be less than a millisecond; instead, a decision was made to make these adjustments in “human” time: each agent waits “a few beats” before making adjustments, as does the conductor.
3.7 Social Behaviour: Agent Interaction
Once the Conductor has determined that the Density is close enough, the agents can begin social interactions. The agents listen to one another, and attempt to find other agents that have patterns that offer potential for interaction. This tendency is influenced by an agent’s Social parameter, or how willing an agent is to interact with other agents.
Imagine certain musicians in our human ensemble happily playing their patterns, grooving away with their eyes closed — not much social interaction happening here — while certain players will be listening to other players.
How do they actually begin interacting? Just as humans will rely upon eye contact in order to initiate interactions, Kinetic Engine’s agents message one another. The first agent will message the agent it wants to interact with, and wait for a response. If it gets a response in a reasonable amount of time, interaction will occur; however, if the other agent does not respond (perhaps it is not very social, or it is already interacting with another agent), the first agent will look elsewhere for social interaction.
If two agents agree to interact, they begin to adjust their patterns in an effort to create either rhythmic polyphony (interlocking) or heterophonic (similarity). This adjustment is two way, as both agents will adjust their own patterns, which most likely results in further readjustments; again, these adjustments occur “every few beats,” making the process very audible.
3.8 Unpredictability
In most cases, the interaction will eventually stabilize. Two additional personality parameters come into effect at this point: Commitment and Mischievous. Those agents that have a high commitment rating will happily stay in a social relationship for long periods; those with low ratings will get bored, and attempt to find new partners for interaction. The Mischievous parameter determines how willing an agent is to upset a stable system; this can happen in two ways. If the agent is playing, it can suddenly stop playing, causing active players to readjust their patterns, and possibly force non-active players to start playing. Non-active agents can suddenly start playing, again upsetting a stable system, and likewise causing readjustment by both active and non-active agents.
3.9 Influencing the Ensemble
As well as density, I can turn agents on and off, thus also causing the same sort of subtle readjustments. Lastly, I can influence the personality of the entire ensemble, increasing, for example, the social parameter of all agents.
3.10 The End Result
The end result is a complex, evolving rhythmic polyphony over which I have high level control (i.e. top down), but whose complexity is determined from within the agent’s themselves (i.e. bottom up). The output of Kinetic Engine can be direct audio, playing samples, or MIDI. It has been used to control the MahaDeviBot, a twelve armed robotic percussionist.
4. Melodic Agents
In In Equilibrio, the output of six rhythm agents is sent to six melodic agents. Like the rhythmic agents, the melodic agents have unique parameters that determine how to choose their pitches.
At the start of a new phrase (which is independent from the rhythmic pattern), the melodic agent chooses a starting pitch, based upon a user-set startPitch parameter, with the length of the phrase determined by the user-set phrase parameter. As with most user-set parameters, the actual length will be a Gaussian selection around this value.
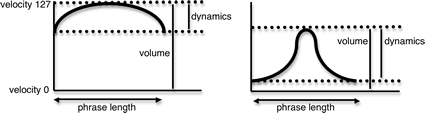
Each phrase will have a dynamic curve, influenced by the agent’s volume (the maximum volume of the curve) and the dynamic (the difference between the minimum and maximum). This separation allows independent control over an agent’s volume and dynamic shape (Fig. 1).
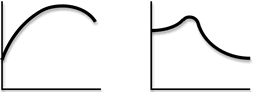
The shape itself can be altered in terms of its bandwidth and its shape, which include a Hanning curve, a rising sawtooth, and a falling sawtooth. Lastly, these shapes can be interpolated (Fig. 2).
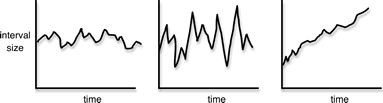
The amount of vertical movement (intervallic distance from a previous pitch) is determined by the agent’s flux parameter, which is a Gaussian selection around the previous pitch. This selection can be influenced by a tilt parameter, which can force an upward or downward movement (Fig. 3).
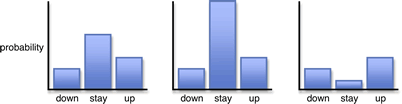
Melodic movement is further influenced by a gravity parameter. Each pitch has an attraction probability vector based upon its relationship to a user-defined pitch set. This vector determines whether a pitch, initially selected using the flux parameter, will remain at that pitch, or move to its upper or lower neighbour. For example, tonic pitches will have a high “stay” value within the vector, while a leading tone will have a high “up” value. Although this suggests functional tonal organization, I have found that using such rules in non-tonal music contributes to a logical voice-leading. The gravity parameter will increase, or decrease, the “stay” value within the vector (Fig. 4); thus, a higher gravity setting will tend to favour those pitches that are deemed “goals” within the pitch set, while lower gravity setting will increase movement away from these pitches.
The pitch set is selected prior to performance, including the individual attraction vectors. Harmonic change is generated by rotations of the pitch set. For example, given a pitch set (C Db Eb F# G A B C) a successive semitone relationship is derived of (1 2 3 1 2 2 1). Rotating this relationship by one results in the following semitone relationship (2 3 1 2 2 1 1), which is translated into the pitch set (C D F F# G# A# B C). In performance, I control when a harmonic variation is made. The actual rotation selected is made by the software, dependent upon how much change is required (the amount of change is another user-set parameter): pitch sets with only one or two note differences between them are considered slight changes, whereas pitch sets with many individual differences are considered greater changes (the two examples given above have only three of seven notes in common, and therefore would be considered a significant tonal change).
The resultant melodic motion that is somewhat Brownian, influenced by the complex interaction between the various pitch parameters. Vertical interaction between agents is accomplished through their social attributes. Each agent broadcasts to the other agents its initial startPitch. Every few beats, the agent compares its own pitch with that of other agents, and adjusts its following startPitch in an attempt to form a vertical alignment equivalent to triad spacing (i.e. a transposed [0 3 5 7] index selection from the pitch set).
In contrast to the rhythm agents, the organisation of the melodic agents is clearly within the realm of constrained randomness: it is a generative system whose success depends upon the definition, and variation, of its many interdependent parameters. As there are too many individual parameters to control effectively during performance, parameter settings are stored as “situations” within presets: starting points for musical sections during performance. I can influence these parameters (for example, increase the dynamic level of all agents by a relative amount), but cannot access individual agent parameters. As such, high level control remains with the composer during performance.
5. Conclusion
In Equilibrio has a curious structure that reflects its long development. The rhythmic organization, using Kinetic Engine v.2, took almost two years to develop. I can safely state that it makes intelligent musical choices, and displays organized complexity. The resulting rhythmic interaction exhibits decisions that I certainly could have made. I can let the system run for long periods of time, and it will make interesting musical choices.
The pitch algorithm, using Kinetic Engine v.4, uses only limited multi-agent algorithms to adjust pitches already selected through a complex, interdependent pitch selection algorithm. Pitch choice is unpredictable (in their detail) and complex, and results in a performance that is truly interactive: I do not control the software, but respond to it, and these responses are limited, in most cases, to influencing, rather than specifying, parameter selection. In Chadabe’s words, I’m “flying by wire,” and reacting to the software’s musical choices. While this is an interesting performance situation, it is not (yet) intelligent.
Current development includes using a neural network to monitor my performance in an effort to learn what changes I make, and when I make them. At the same time, the resultant music is continually analysed statistically, and comparisons between this analysis and the performance actions can be made. For example, if I change the overall density, the analysis of the music prior to this change would suggest a musical deficiency (i.e. a musical density that has been static for too long, or a combination of dissimilar, complex gestures). It is hoped that these deficiencies can be learned, and recognized, with the eventual adjustments being made by the software.
Portions of the software described, as well as a video of In Equilibrio, can be found on the author’s website.Acknowledgements
The development of Kinetic Engine has been funded by a SSHRC Research Creation Grant. The software described has been developed on a Macintosh computer using Cycling 74’s Max/MSP software.
References
Benson, Bruce Ellis. The Improvisation of Musical Dialogue: A Phenomenology of Music. Cambridge University Press, 2003.
Chadabe, Joel. “Some Reflections on the Nature of the Landscape within Which Computer Music Systems are Designed.” Computer Music Journal 1/3 (1977).
_____. “Interactive Composing: An Overview.” Computer Music Journal 8/1 (1984).
Dahlstedt, Palle and Peter McBurney. “Musical Agents.” Leonardo 39/5 (2006).
Eigenfeldt, Arne. “Drum Circle: Intelligent Agents in Max/MSP.” Proceedings of the 2007 International Computer Music Conference.
_____. “Intelligent Real-time Composition,” eContact 10.4 — Temps réel, improvisation et interactivité en électroacoustique / Live-electronics — Improvisation — Interactivity in Electroacoustics (October 2008). https://econtact.ca/10_4/eigenfeldt_realtime.html
_____. “Multiagent Modeling of Complex Rhythmic Interactions in Realtime Performance.” Sounds of Artificial Life: Breeding Music with Digital Biology. A-R Editions, 2008.
Lewis, George. “Interacting with Latter-Day Musical Automata.” Contemporary Music Review. 18/3 (1999)
Minsky, Marvin. The Society of Mind. New York: Simon & Schuster, 1986.
Rowe, Robert. Interactive Music Systems. MIT Press, 1992.
Weaver, Warren. “Science and Complexity.” American Scientist 36/536 (1948).
Wiggins, Geraint, and Alan Smaill. “Musical Knowledge: What can Artificial Intelligence bring to the Musician?” Readings in Music and Artificial Intelligence. Edited by E.R. Miranda. 2000.
Winkler, Todd. “Strategies for Interaction: Computer Music, Performance, and Multimedia.” Proceedings of the 1995 Connecticut College Symposium on Arts and Technology.
Woolridge, Michael and Nicholas R. Jennings. “Intelligent Agents: Theory and practice.” Knowledge Engineering Review 10/2 (1995)
Wulfhorst, Rodolfo Daniel, Lauro Nakayama and Rosa Maria Vicari. “A Multiagent Approach for Musical Interactive Systems.” AAMAS (2003).
Social top